Meta 和 CMU 联合研究团队耗时两年,成功开发出了一款名为 RoboAgent 的通用机器人智能体。RoboAgent 仅仅通过7500个轨迹的训练就实现了12种不同的复杂技能,包括烘焙、拾取物品、上茶、清洁厨房等任务,并能在100种未知场景中泛化应用。
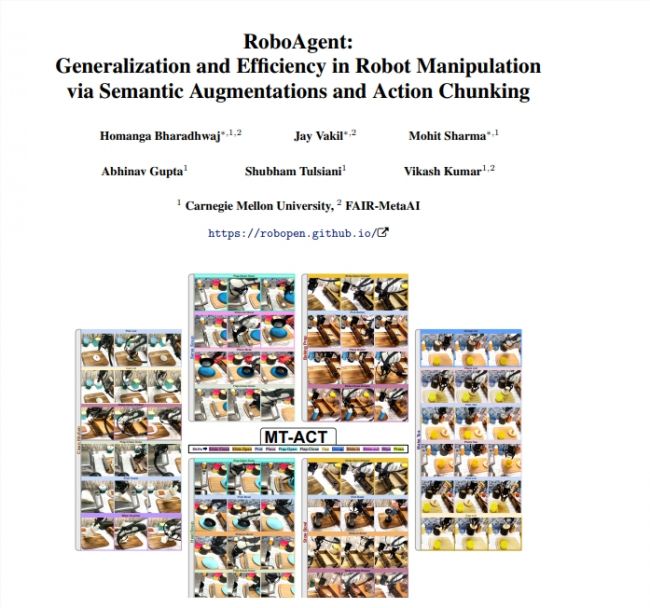
无论遇到多大的干扰,RoboAgent 都能坚持完成任务。该研究的目标是建立一个高效的机器人学习范例,解决数据集和场景多样性的挑战。研究人员提出了多任务动作分块 Transformer(MT-ACT)架构,通过语义增强和高效的策略表示来处理多模态多任务机器人数据集。
研究人员还开发了 RoboSet 数据集,其中包含7500条轨迹,涵盖12种不同的技能和多个任务和场景。通过离线添加不同变化的场景来增加数据集,并使用动作分块 Transformer 模型来处理多任务数据。实验结果显示,MT-ACT 策略在通用性和样本效率上表现出色,优于其他基线模型。这项研究对于推动通用机器人智能体的发展具有重要意义。


访谈
更多做行业赋能者 HID迎接数字化浪潮新机遇 破解新挑战
今年3月份,全球可信身份解决方案提供商HID发布了最新的《安防行业现状报告》(以下简称“报告”),该报告…
数字化浪潮下,安防厂商如何满足行业客户的定制化需求?
回顾近两年,受疫情因素影响,包括安防在内的诸多行业领域都遭受了来自市场 “不确定性”因素的冲击,市场…
博思高邓绍昌:乘产品创新及客户服务之舟,在市场变革中逆风飞扬
11月24日,由慧聪物联网、慧聪安防网、慧聪电子网主办的2022(第十九届)中国物联网产业大会暨品牌盛会,在深…